
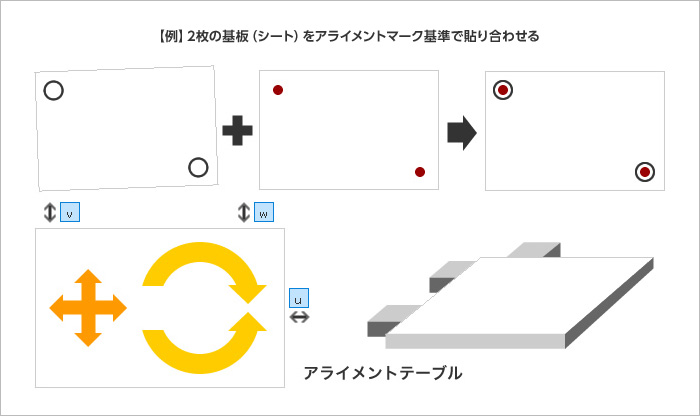
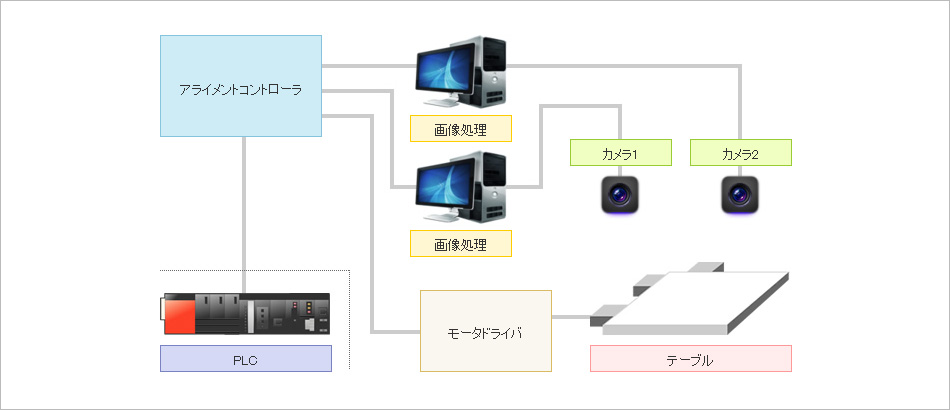
本コントローラは、画像処理装置を使用し、アライメントマークの位置データを取得、X、Y、θのズレ量を計算してU,V,Wの3軸のパルスモータ(サーボモータ)で制御される座標系に変換して位置決めを行うコントローラです。
原点復帰、アライメント指令、手動操作等、外部入力信号によって遠隔制御することができます。
すでにお客様に投入済みの画像処理機器を活用することも可能です。
ご希望の装置に必要な機能を追加することも出来ますので、アライメント機能を使った装置の設計・製作をいたします
取付け画像処理系、アライメントテーブルの分解能等により異なりますが、視野角10mm□で±10μm程度の精度で位置決めする事が可能です。プリアライメントをする事により、視野角を狭くする事で精度を上げることが可能です。
- ■ カメラの取付け位置、座標の旋回等の微調整は要りません。
- ■ カメラ数の制限はありません。
- ■ オートキャリブレーション機能により、キャリブレーション作業を自動&短時間で終わらせます。
- ■ 基板露光機用位置決め
- ■ 基板貼り合せ用位置決め
- ■ FPC等の精密型抜き用位置決め
![]()